-
Feature
-
Resolution: Obsolete
-
 Normal
Normal
-
None
-
None
-
Product / Portfolio Work
-
None
-
False
-
-
False
-
None
-
5
-
None
-
Tech Preview
-
None
-
None
-
-
None
-
None
-
None
-
None
Feature Overview (aka. Goal Summary):
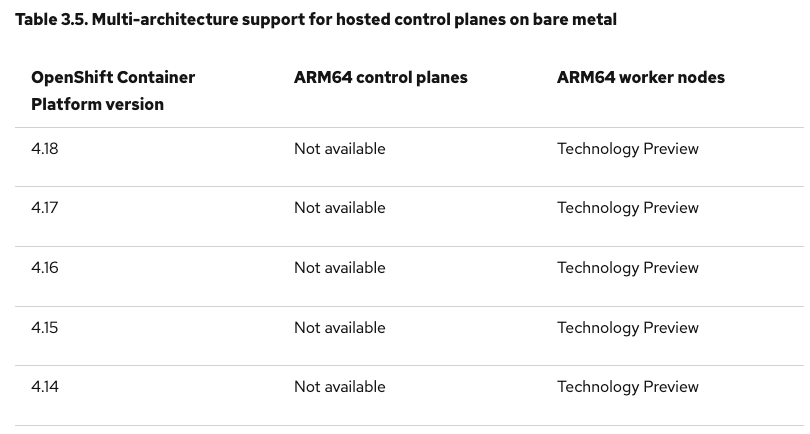
This feature will allow an x86 control plane to operate with compute nodes of type Arm in a HyperShift environment.
Goals (aka. expected user outcomes):
Enable an x86 control plane to operate with an Arm data-plane in a HyperShift environment.
Requirements (aka. Acceptance Criteria):
- The feature must allow an x86 control plane and an Arm data-plane to be used together in a HyperShift environment.
- The feature must provide documentation on how to set up and use the x86 control plane with an Arm data-plane in a HyperShift environment.
- The feature must be tested and verified to work reliably and securely in a production environment.
Customer Considerations:
Customers who require a mix of x86 control plane and Arm data-plane for their HyperShift environment will benefit from this feature.
Documentation Considerations:
- Documentation should include clear instructions on how to set up and use the x86 control plane with an Arm data-plane in a HyperShift environment.
- Documentation will live on docs.openshift.com
Interoperability Considerations:
This feature should not impact other OpenShift layered products and versions in the portfolio.
- is cloned by
-
-
- Closed
-
- is depended on by
-
-
- Closed
-
- links to

