-
Feature
-
Resolution: Done
-
 Critical
Critical
-
None
-
Product / Portfolio Work
-
None
-
0% To Do, 0% In Progress, 100% Done
-
False
-
-
False
-
None
-
9
-
None
-
None
-
None
-
None
-
None
-
None
-
None
-
None
Feature Overview (Goal Summary)
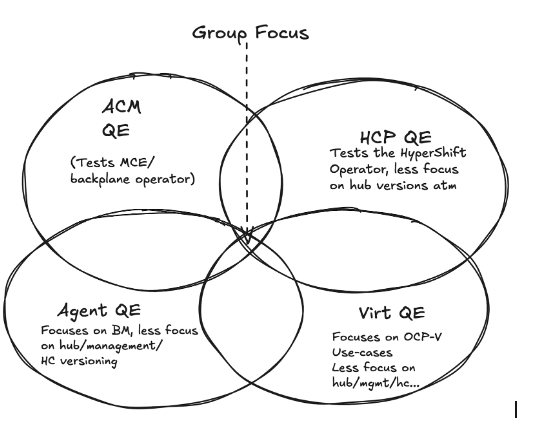
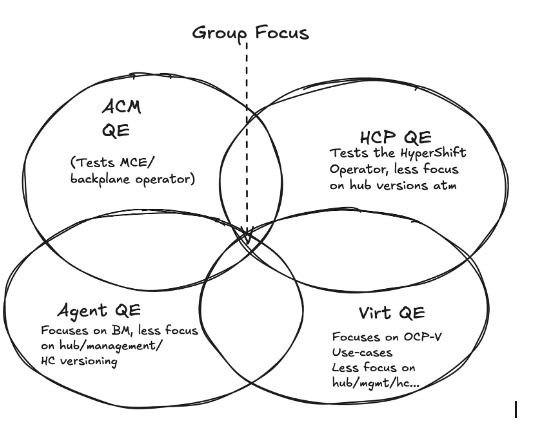
We aim to continue establishing a comprehensive testing strategy for Hosted Control Planes (HCP) that aligns with Red Hat’s support requirements and ensures customer satisfaction. This involves testing across various permutations, including providers, lifecycle, upgrades, and version compatibility. The testing must span management clusters, hubs, MCE, control planes, and nodepools, while coordinating across multiple QE teams to avoid duplication and inefficiencies. We aim to sustain an evolving testing matrix to meet product demands, especially as new versions and extended OCP lifecycles are introduced.
Goals (Expected User Outcomes)
- Provide a scalable, systematic approach for testing HCP across multiple environments and scenarios.
- Ensure coordination between all QE teams (ACM/MCE, HCP, KubeVirt, Agent) to avoid redundancies and inefficiencies in testing.
- Establish a robust testing framework that can handle upgrades and version compatibility while maintaining compliance with Red Hat’s lifecycle policies.
- Offer a clear view of coverage across different permutations of control planes and node pools.
Requirements (Acceptance Criteria)
- Testing matrix covers all relevant permutations of management clusters, hubs, MCE, control planes, and node pools.
- Use of representative sampling to ensure critical combinations are tested without unnecessary resource strain.
- Ensure testing for upgrades includes fresh install scenarios to streamline coverage.
- Automated processes in place to trigger relevant tests for new MCE builds or HCP updates.
- Comprehensive tracking of QE teams’ coverage to avoid duplicated efforts.
- Test execution time is optimized to reduce delays in delivery without compromising coverage.
Deployment Considerations
- Self-managed, managed, or both: self-managed.
- Classic (standalone cluster): No.
- Hosted control planes: Yes.
- Multi-node, Compact (three node), or Single node (SNO), or all: N/A.
- Connected / Restricted Network: Yes.
- Architectures: x86_x64, ARM (aarch64), IBM Power (ppc64le), and IBM Z (s390x).
- Operator compatibility: Yes, ensure operator updates don't break testing workflows.
- Backport needed: N/A
- UI need:N/A
- Other: N/A.
Use Cases (Optional)
See: https://docs.google.com/spreadsheets/d/1j8TjMfyCfEt8OzTgvrAG3tuC6WMweBh5ElzWu6oAvUw/edit?gid=0#gid=0
- Same hub multiple HCP Versions: Using the same managmenent/hub cluster (e.g., 4.15), to provision up to n+4 newer cluster versions
- MCE ft. Management cluster compatibility.
- MCE ft. HCP versions compatibility
- Upgrade Scenarios: Testing a management cluster upgrade from version 4.14 to 4.15, ensuring all connected node pools and control planes operate seamlessly.
- Fresh Install Scenarios: Testing a new deployment with different node pool versions to ensure all configurations work correctly without requiring manual interventions.
Background
The HCP architecture introduces decoupled control planes and worker nodes, significantly increasing the number of testing permutations. Ensuring these scenarios are tested is crucial to maintaining product quality, customer satisfaction, and stay compliant as an OpenShift form-factor.
- depends on
-
ACM-19346 Update the hypershift CI MCE test scripts to verify MCE status
-

- Closed
-
- is related to
-
OCPBUGS-44927 [release-4.17 backport] MCE 2.7 create HostedCluster failed due to multi-arch check
-
- Closed
-
- links to
- mentioned in
-
Page Loading...

